
-
MOTOYAMA本山
-
捷克Dinel
-
意大利ARTEC
-
德国JOKARI
-
意大利GEV
-
德国Microsonic
-
意大利RAC-Fluid
-
德国DRUSEIDT
-
意大利TOGNELLA
-
德国AUTOSEN
-
土耳其Oleocon
-
捷克COMET
-
德国ISOLOC
-
德国EGE-ELEKTR...
-
意大利ATAM
-
RIYYO
-
FUKUDA福田电机
-
AICHITOKEI爱知
-
REX工业
-
TOAKOUKYU东亚高...
-
KURAKA仓敷化工
-
TOMOEVALVE巴阀...
-
NICHIAS霓佳斯
-
YAMAMOTO山本镀金
-
SHOWA昭和
-
TOSHITAKE耀希达...
-
SHIMURA志村
-
HOKUTO北斗
-
JOPLAX乔甫拉克斯
-
日本ENDO远藤
-
SANWA三和
-
日本KABUTO
-
KONSEI近藤
-
FUJIKIN富士金
-
YOKOKOWA KEI...
-
TORAY东丽
-
TOYOX东洋克斯
-
TOZEN滔辰
-
HORIBA堀场
-
OJIDEN大阪
-
NKS中谷机械制造所
-
VENN桃太郎
-
TOYO东洋阀门
-
日本YAMAYU
-
日本BL
-
日本ONOSOKK
-
COPAL尼德科科宝
-
OHKURA大仓
-
HIOS好握速
-
WERKA未和华
-
日本富士FUJI
-
HEIDON新东科学
-
FESTO费斯托
-
FUSOSEIKI扶桑精...
-
日本OMRON欧姆龙
-
日本KANETEC强力
-
日本威威VESSEL
-
日本爱知时计Aichi ...
-
SIBATA柴田
-
日本RSK
-
KYORITSU共立理化
-
azbil山武
-
FINTECH
-
JRM
-
JAPANSENSOR日...
-
BL必爱路
-
SIGMAKOKI西格玛...
-
MEDAT美达
- NPM 脉冲
-
YAMATO雅马拓
-
TOKISANGYO东机...
-
SHIMADZU岛津
- REVOX莱宝克斯
-
METTLER TOLE...
- SERIC索莱克
-
NBK锅屋
- NPM脉冲
-
ARIMITSU有光
- SSD西西蒂
-
KASHIYAMA樫山
-
SHINWA亲和测定
-
DRY-CABI
-
HEISHIN兵神
-
NICHIGI日油技研
-
TOHKEMY特开立
-
KONICA MINOL...
-
EPM株式会社
-
TAKIKAWA泷川
-
Maruyama丸山
-
NIDEC尼得科新宝
-
KEYENCE基恩士
-
MSYSTEM爱模
-
TSUBAKI椿本
-
ATAGO爱拓
-
MARUKA日本株式会社
-
MATSUI松井
- EMIC爱美克
-
ISB井口机工
- TEITSU帝通电子
-
KETT凯特
- ONOSOKKI小野
-
HANNA哈纳
- MIDORI绿测器
-
AMADA天田
-
HODAKA穗高
-
UNIPULSE尤尼帕斯
-
ASKER奥斯卡
-
FUJICON富士
-
CHINO千野
-
FREEBEAR福力百亚
- YUASA
-
MOTHERTOOL
-
METROL美德龙
-
CHELIC气立可
-
SIMCO思美高
-
KYORITSU克列茨(...
- QUARK夸克
-
YAMADA山田照明
-
JIKCO吉高
-
日本KAMATA TEC...
-
CHUBUSEIKI中部...
- SONIC索尼克
- SAKAGUCHI坂口电...
- CCS晰写速
- SEN日森
- EYE岩崎
- POLARION普拉瑞
- SANKO三高
-
EXCEL听音机
-
NEWKON新光
-
RKC理化工业
-
NITTO日东工器
- SIMCOION思美高
-
NS精密
- TOPCON拓普康
-
SANEI三荣
-
CUSTOM东洋
- SAGADEN嵯峨电机
-
TONE前田
-
PISCO碧铄科
-
NDK电色
-
KIKUSUI菊水
- KYOWA共和
- MARKTEC马科泰克
-
SENSEZ静雄
- 联系人:骆婷
- 联系电话:0799-6669801
- 移动电话:13717021988
- Email:hl@tamasaki.com
- 公司地址:
- 江西省萍乡市安源区春雷粮
- 油批发市场招商中心二楼1-3室
-
-


日本RKC理化工业 PID 控制原理
1.前言
在《什么是 PID 控制》一文中,PID 控制的算法是如何工作的,我们以驾驶汽车为例进行了解说。在本文中我们利用数学公式进一步解说 PID 控制是如何工作的。
2.PID 控制和温度控制
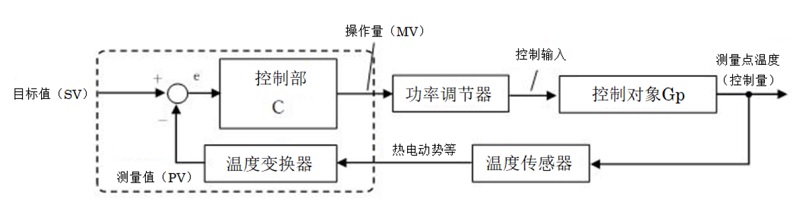
所谓控制就是为了达成某个目的对控对象施加的操作。对温度控制来说就是,为了使测量点的温度与目标值相同对控制对象施加的操作(图 1)。图中的虚线部分是温度控制器的功能框图,控制部 C 相当于 PID 控制算法。
2.1.PID 控制的基本公式
PID 控制的基本公式是,与偏差 e(=SV-PV)成比例的比例动作(Proportional action:P 动作),与偏差的积分成比例的积分动作(Integral action:I 动作)和与偏差的微分成比例的微分动作(Derivative action:D 动作)的和(式(1))。
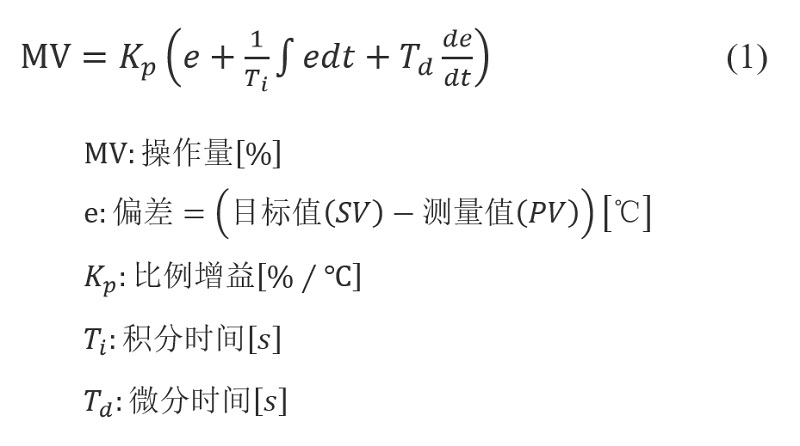
上式中有 3 个参数可以设置,分别是比例增益(Kp),积分时间(Ti)和微分时间(Td)。但是在温度控制器中不能直接设置比例增益,通常是用比例增益(Kp)的倒数比例带 Pb=100/Kp[℃]或者[%]来设置。式(1)右边分别是比例项(P 动作输出),积分项(I 动作输出)和微分项(D 动作输出)。
2.2.PID 控制算法的含义
人们在判断事物时,会考虑“过去”,“现在”和“将来”这三个要素对事物的影响之后,做出结论。PID 控制算法也可以这样解释,“过去→I 动作”,“现在→P 动作”和“将来→D 动作”。
2.3. P 动作和稳定偏差
2.3.1. P 动作
P 动作如式(2)所示,其输出值与现在的偏差 e 成比例。

如果增大比例增益 Kp 的话,对同样的偏差 e,P 动作输出也会增大。但实际上受物理上的限制,操作量 MV只能在 0~100[%]的范围内变化。比如比例带 Pb=30[℃],目标值 SV=100[℃],测量值 PV=40[℃]时,

操作量 MV 计算值是 200[%],实际上只能输出 100[%](图 2(a))。
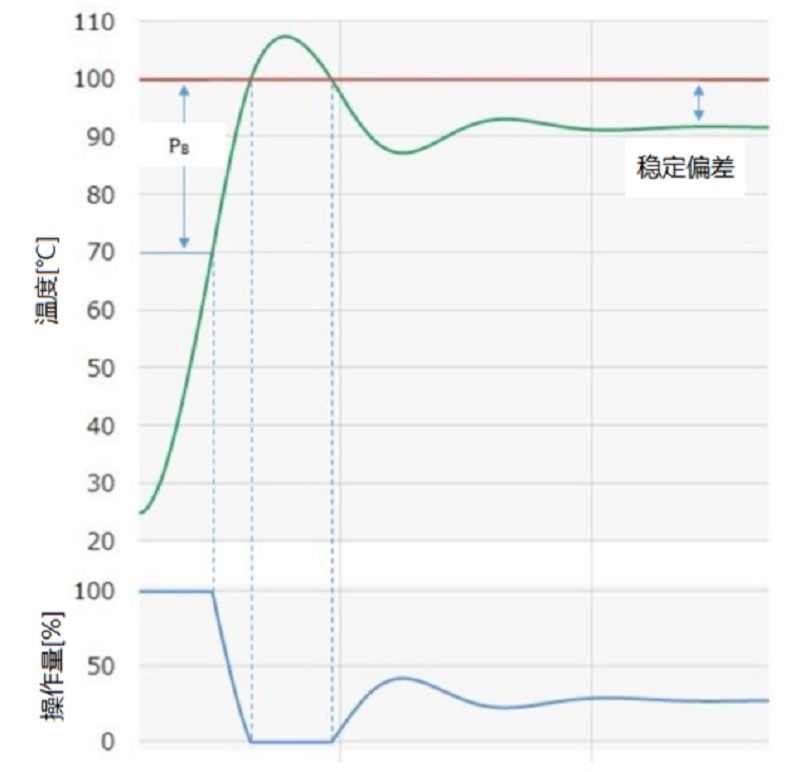
P 动作的问题是稳定后会出现稳定偏差(图 2(a))。增加 Kp 的话,稳定偏差会减小,但是 PV 会出现振动,甚至持续振动。如果设置的 Kp 不出现振动的话,那必定会出现稳定偏差,这就是 P 动作的极限。
2.3.2. 温度偏差
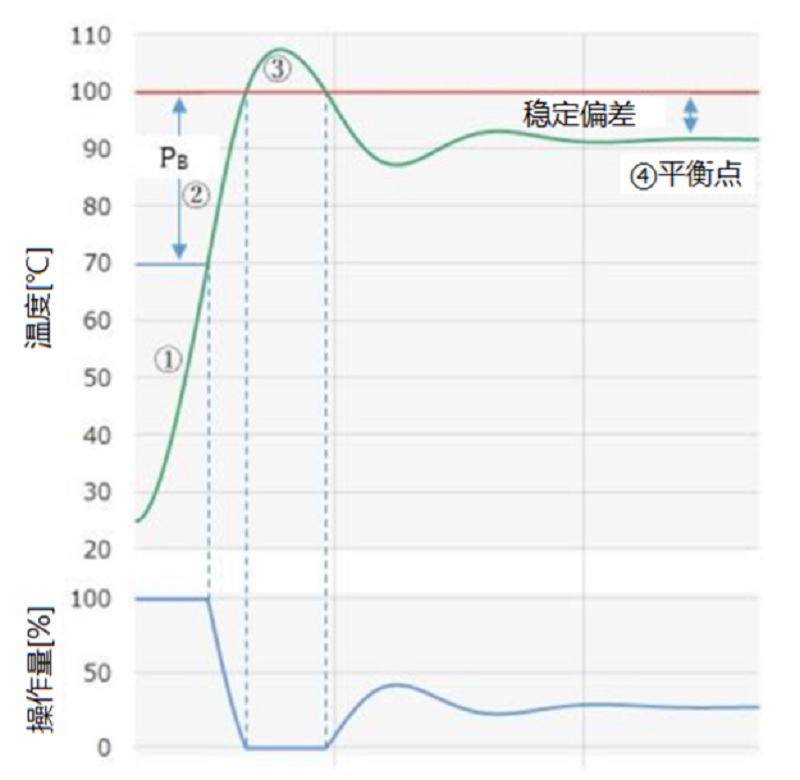
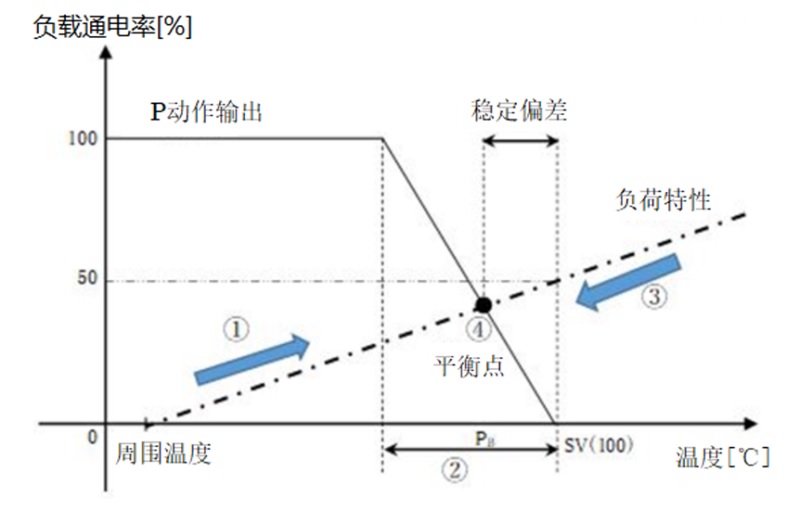
偏差 e 为 0 时 P 动作输出为 0。这就是只有 P 动作的控制会产生稳定偏差的原因。例如对图 2(b)所示负载特性的控制对象,为了使 PV 安定在 SV=100[℃]上需要提供 50[%]的 MV。
①开始时 PV 等于周围温度(比如 25[℃]),因为低于目标值,所以 P 动作输出为 100[%](输出上限值)。
②当 PV 进入比例带后 P 动作输出与偏差 e 成正比。PV 越接近 SV 则 P 动作输出越小。
③当 PV≥SV(100[℃])时,P 动作输出为 0[%](输出下限值)。PV 开始减小。
④*终 PV 稳定在 P 动作输出和负载特性的平衡点。此时目标值和平衡点之间的偏差称为稳定偏差。
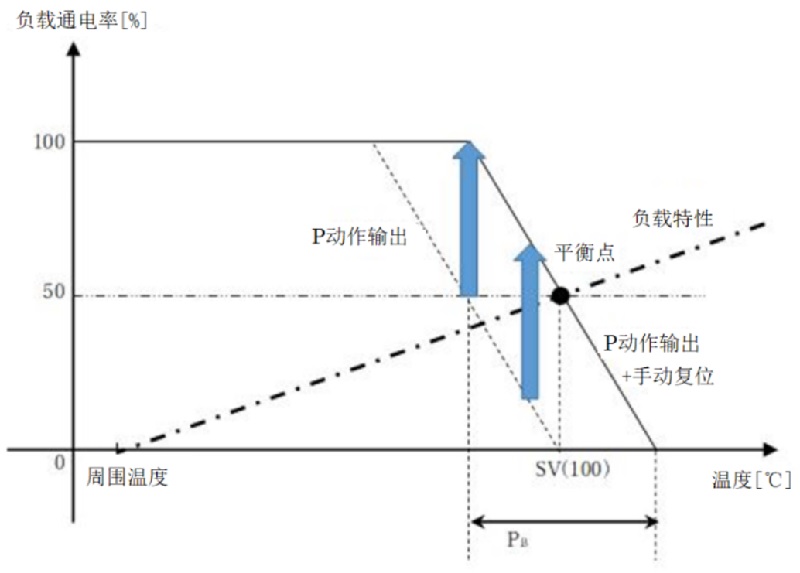
为了消除稳定偏差,需要在式(2)增加手动复位 50[%],或者增加 I 动作。
(*1)负载特性定义为稳定(热平衡)状态温度和负载通电率[%]的关系。
2.4. PI 动作和积分时间
在式(2)中添加 I 动作输出,成为 PI 动作的公式(3)。

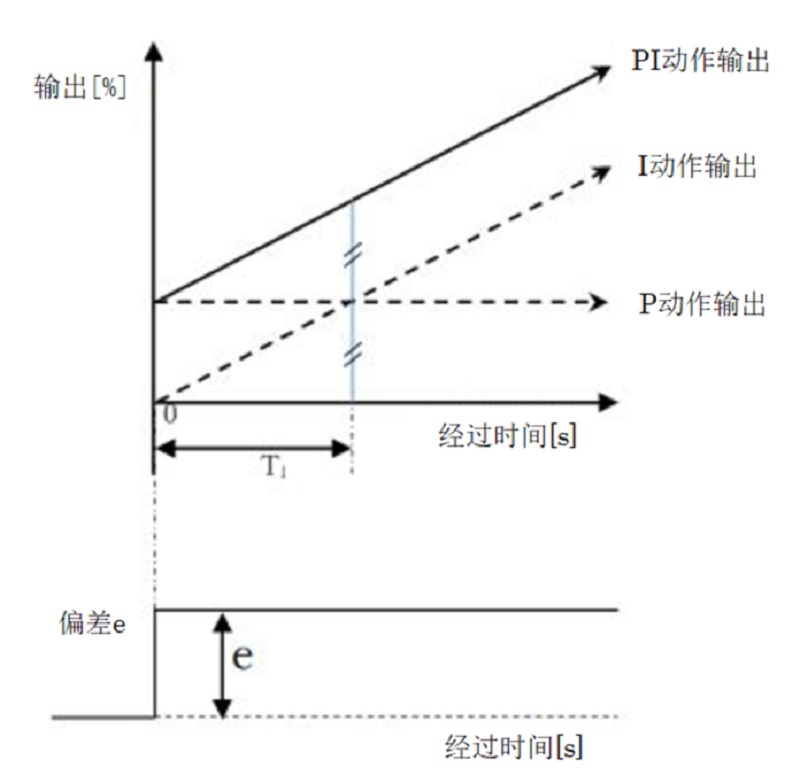
因为 I 动作是过去偏差 e 的累加值,如果(e>0)的话则不断增加,(e<0)则不断减小。I 动作输出的初始值设置为 0,偏差一定时,在 t1 时刻 P 动作输出和 I 动作输出用下式表示。
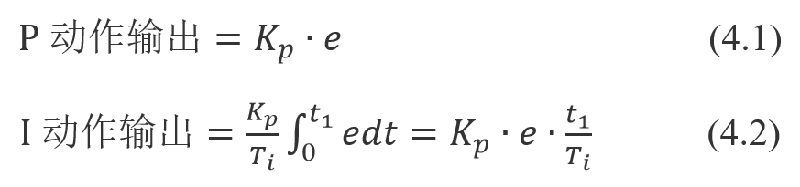
比较二式,可以看到当 t1=Ti 时 I 动作输出等于 P 动作输出。从恒定的偏差输入开始时刻到 I 动作输出等于P 动作输出为止的时间被称为积分时间 Ti。P 动作是与偏差成正比的输出,而 I 动作是直到偏差 e 变成 0 为止输出不断增加(或者减少)。为此,即使收敛速度因积分时间 Ti 不同,*终稳定偏差也会变成 0。重要的是,即使偏差 e 变成 0,先前累加的积分值继续输出。利用 I 动作输出可以得到与手动设置同样效果的自动复位。
2.5.PD 动作和微分
在式(2)上添加偏差 e 的微分(变化速度)D 动作输出,成为 PD 动作的公式(5)。

D 动作是与偏差 e 的微分值(变化速度)成比例的输出,抑制未来偏差的速度变化。D 动作产生与变化速度相反的阻力,因此将其称为阻尼器。阻尼器又被称为减震器(衰减振动的装置),是构成汽车和摩托车悬架的部件之一。汽车没有阻尼器的话运行时车体就会振动,乘坐质量变差。D 动作在温度控制中同样有衰减振动的功能。
比如,稳定在 SV 的温度 PV 由于干扰突然降低(de/dt > 0)时,则 D 动作输出一个正方向值抑制干扰引起的变化。另外,升温时(de/dt < 0),D 动作输出一个负方向值抑制过热(超调)。偏差以恒定速度增加时(图4),D 动作输出为恒定值。当偏差为恒定值(变化速度为零)时 D 动作输出为零,不能消除稳定偏差。
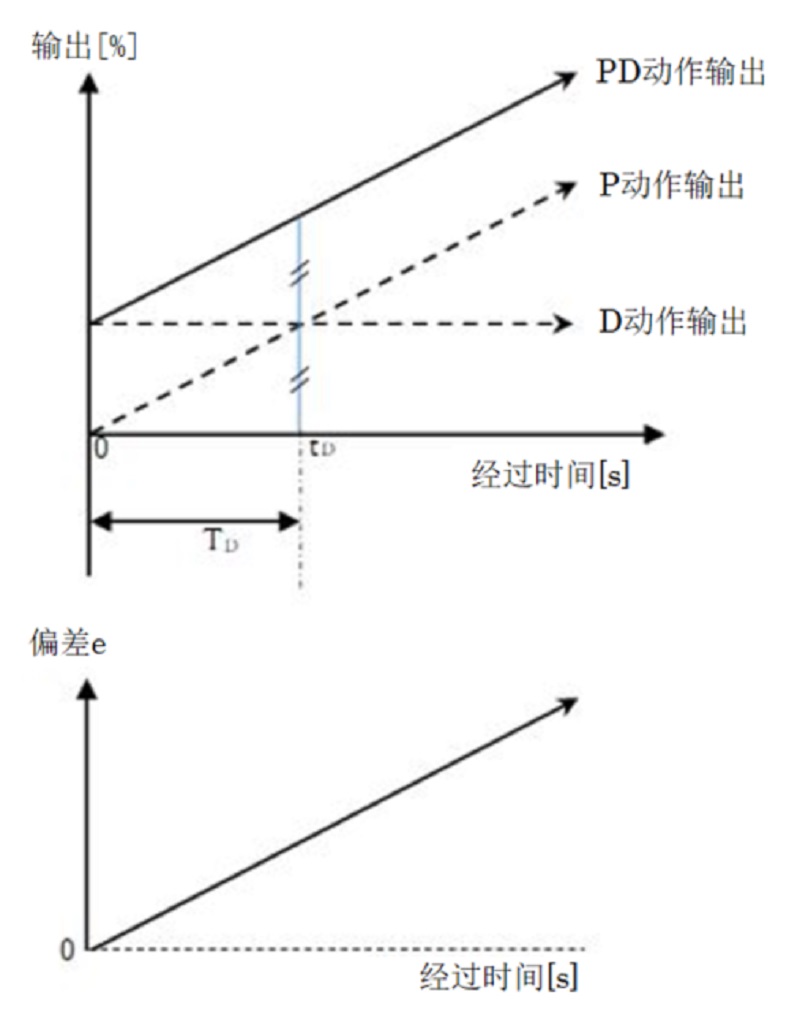
另外,微分时间 Td 被定义为,斜坡形偏差(以恒定斜率变化的偏差)的 P 动作输出 = D 动作输出时的时间。
3.结语
我们使用数学公式解说了 PID 的各个基本动作。实际上的控制还需要一些创意工夫,希望本文对您理解 PID控制有帮助。
以上
日本RKC理化工业 PID 控制原理日本RKC理化工业 PID 控制原理
日本RKC理化工业 PID 控制原理日本RKC理化工业 PID 控制原理日本RKC理化工业 PID 控制原理
京都玉崎株式会社-中部地区办事处
江西省江崎贸易有限公司
2022.10.28